linear stepping motor linear actuator is essentially rotary stepper motor “unwrapped” to operate in straight line. Linear motor operates on electromagnetic principle and consists of moving “forcer” and stationary platen. The platen is passive toothed steel bar (stainless is available) extending over desired length of travel. Forcer incorporates electromagnetic modules and bearings and moves bi-directionally along the platen.
linear stepper motor is an turn-key linear actuator available with either mechanical roller bearing or air bearings.
Side and bottom mechanical bearings are built into forcer and do not require any adjustments by the user over the lifetime of the motor. They are permanently lubricated and exhibit very little friction.
Air bearing operates by floating the forcer on high pressure air introduced through orifices in the forcer. Air bearing motors can operate continuously at high speed without wear. Air bearing permit smaller air gap resulting in larger motor forces.
linear stepping motor linear actuators are micro-stepped by proportioning currents in two phases of the forcer, much same as in rotary stepper motors. When micro-stepper linear stepper motors following benefits are achieved:
Manufacturers apply the term “closed-loop stepper” to a wide array of controls. Here, we’ll spell out how the three most common closed-loop stepper control schemes work and highlight their advantages and disadvantages.
Are all closed-loop stepper systems created equal?
No. Some manufacturers give the closed-loop stepper motor systems similar-sounding descriptions, which confuses the marketplace. As proof of the confusion, it’s not uncommon that a designer requests one capability and actually needs another.
What are the most common closed-loop stepper systems?
There are three common types: Closed-loop stepper with step-loss compensation; closed-loop stepper with load position control; and closed-loop stepper servo control. Stepper-drive manufacturers call them all “closed loop” but the three have distinct functionalities.
What are the functionalities of these closed-loop stepper systems?
Closed-loop stepper with step-loss compensation is the most common type of closed-loop stepper control. The stepper drive operates as a micro-stepping drive and typically receives pulse and direction commands to move to the desired position. An encoder tracks shaft or load position. If lost steps are detected, a compensation algorithm inserts additional steps so that the motor shaft (or load) arrives at the desired position. Typically, the Closed-loop stepper-motor driver has settings for two currents: The motor gets running current when in motion and gets resting current when stopped.
Like servo motors, china stepper motors are available in both rotary and linear designs. When an application requires force (rather than torque) output and can operate in open loop control, a linear stepper motor is often the preferred solution. Although linear stepper motors are available in both variable reluctance and hybrid designs, the more common version is hybrid linear stepper motors.
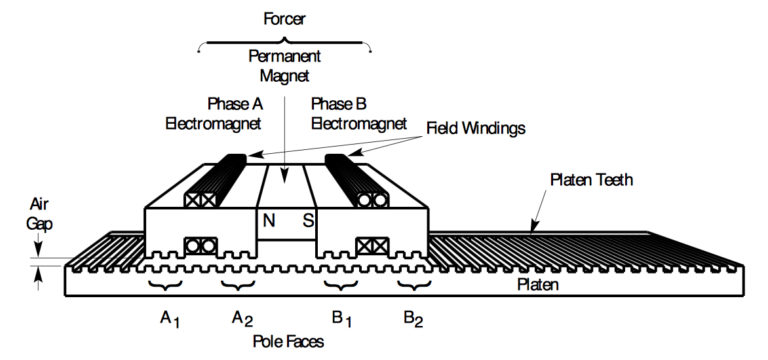
In a hybrid linear stepper motor, the base, or platen, is a passive steel or stainless steel plate with slots milled into it. The forcer contains motor windings, permanent magnets, and laminations with slotted teeth that serve to concentrate the flux that’s created when current is applied to the coils. The teeth of the forcer and the platen are staggered by ¼ tooth pitch in relation to one another to ensure that constant attraction is maintained and that the next set of teeth will come into alignment as current is switched in the coils. This means that for each full step of the motor, the forcer moves along the platen by ¼ tooth pitch.
Whereas variable reluctance linear stepper motors for sale can only operate in full step mode, hybrid versions can operate in either full step or microstepping modes. Microstepping, which divides the step angle into smaller increments, enables higher resolution motion and better control of speed and force. Because each phase of the motor is driven with (theoretically) ideal sine waves, 90 degrees apart, microstepping also allows the current to increase in one winding as it decreases in the other, providing smoother operation at low speeds than can be achieved with full- or half-step operation.
Microstepping makes the current waveform more sinusoidal and provides smoother motion at low speeds. Image credit: Servo-drive LLC.
For guiding the load on hybrid linear stepper motors, either mechanical roller bearings or air bearings are typically used. (Because the platen in a hybrid linear stepper motor is passive, it can serve as the air bearing surface.) The magnetic flux between the forcer and platen creates a strong magnetic attraction, so these support bearings actually serve two purposes – to guide and support the load and to maintain the correct air gap between the forcer and the platen.
Like other linear motor designs, hybrid linear stepper motors can incorporate multiple forcers onto one platen, with each forcer moving independently. In addition to smooth low-speed operation (obtained with microstepping control), they are also able to achieve very high speeds and accelerations with high resolution and low to moderate force generation.
With simple mechanical construction and easy setup (no servo tuning required), hybrid linear stepper motors are ideal for applications that can operate in open-loop mode and that require either high speed with low force production or very smooth motion at low speed.
When the stepper motor receives the final pulse signal, (either one or from a continuous train), it will stop rotating. However, complete rest will not occur until all the oscillations have stopped. The time it takes from the application of the last pulse received until the stepper motor comes to a complete rest is known as settling time. (See graph below). Resonance occurs when the stepper motor suddenly makes large oscillations, or the output torque suddenly drops at one certain pulse rate or numerous small regions of pulse rates. The stepper motor will stop (stall), may miss steps or reverse direction from the commanded direction. This phenomenon occurs when the natural frequency of the stepper motor coincides with the frequency of the input pulse rate. This generally occurs around 100 – 200 pulses per second in a full-step operation, and also at higher pulse rates. Microstepping half-step operation, or electrical or mechanical damping, can reduce resonance issues. Microstepping has a large effect on settling time and resonance due to the smaller angular displacement taken per pulse. See Figure below.
Resonance Characteristics
Since a hybrid stepper motor system is a discreet increment positioning system, it is subject to the effect of resonance. Where the system is operated at this given frequency, it may begin oscillating. The primary resonance frequency occurs at about one revolution per second. Oscillating will cause a loss of effective torque and may result in a loss of synchronism. Settling time and resonance can be best dealt with by dampening the stepper motor’s oscillations through mechanical means. Mechanically, a friction or viscous damper may be mounted on the stepper motor to smooth out the desired motion.
Methods for Changing or Reducing Resonance Points:
• Use of Gearboxes or Pulley Ratios
• Utilize Microstep Drive Techniques
• Change System Inertia
• Accelerate Through Resonance Speed Ranges
• Correct Coupling Compliance
 ents by the user over the lifetime of the motor. They are permanently lubricated and exhibit very little friction.
ents by the user over the lifetime of the motor. They are permanently lubricated and exhibit very little friction.


