What is a Permanent magnet stepper motor?
Permanent magnet stepper motors are rotated using a magnetic core that interacts with the stator’s pulsed electromagnetic field.
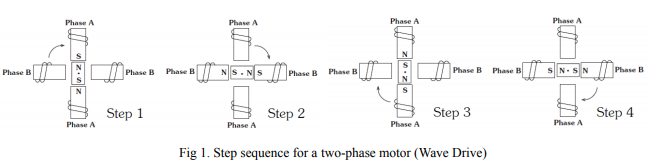
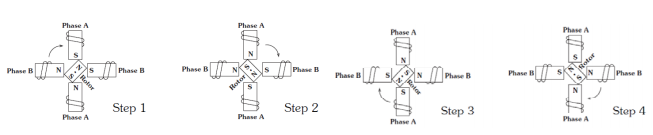
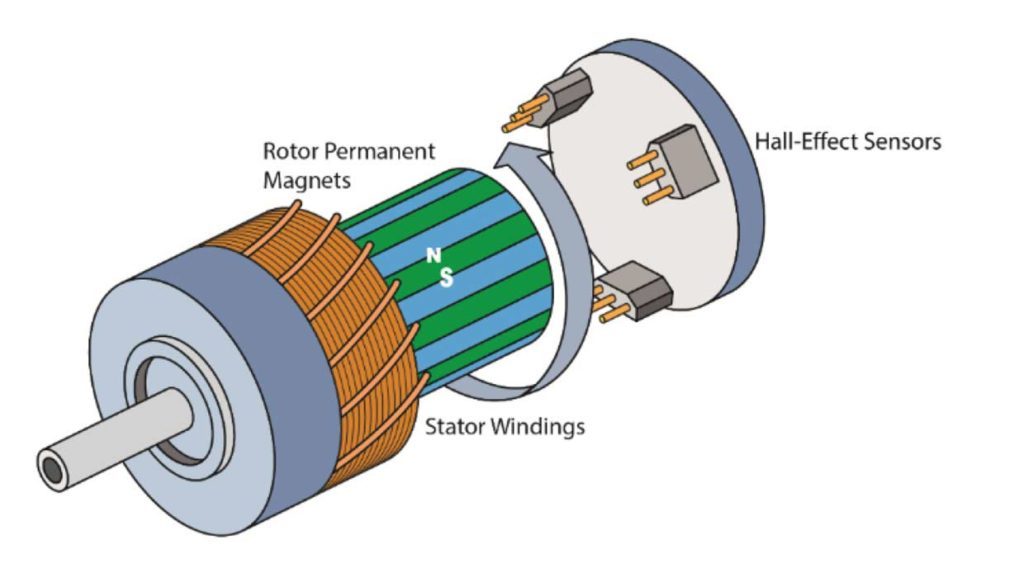
Two-phase permanent magnet step motors are usually two-phase. They have small torque and volume and a stepping angle of 7.5 to 15 degrees. There are two parts to a motor: the stator and the rotor. If the stator has a coil, then the rotor will be a permanent magnetic magnet. Or, the stator can be a coil and the rotor a coil.

Principle of the Stepper Motor
The principle of operation of the stepper motor works in a similar way to a conventional motor. It operates on the principle known as Lorentz Force law. It states that a current-carrying conductor placed in a magnetic field experiences a force due to the interaction between fluxes.
There are two types of flux that interact: stator magnetic flux (or rotor magnet flux). External excitations create the stator magnetic flux, while permanent magnets create the rotor. Fleming’s left hand rule governs the direction of motor.
Advantages and disadvantages of the Stepper Motor
Permanent magnet stepper motors offer many benefits.
Its compact size makes it ideal for many applications.
The losses are lower because there is no external excitation
The maintenance is lower because there is no external excitation.
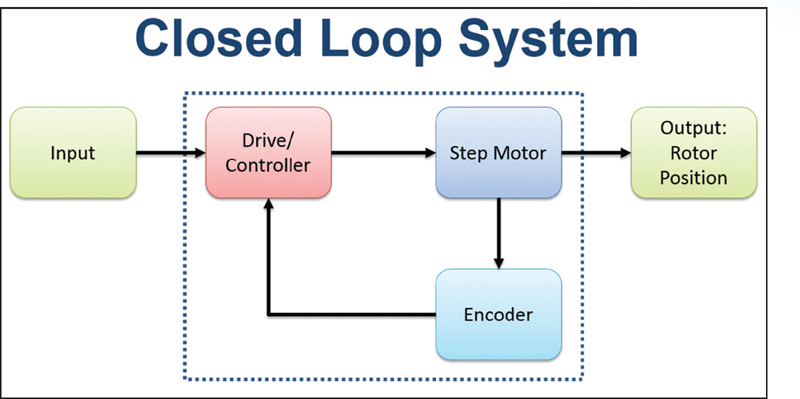
It can be connected with the external circuit to control the speed.
To locate the rotor windings, sensors may be used
It can be used in a wide range speed and torque.
Precise Control
A permanent magnet stepper motor has its disadvantages.
It cannot be used in high-power applications due to its limitations as a permanent magnet
The amount of torque produced is very limited
Permanent magnets have a limited life span.
Applications
Permanent magnet stepper motors have many applications.
Aeronautical industry
Robotics
Toys
Manufacturing
Control industry
Printing and mills
We have now seen the working principle, constructional details, and the applications of the pm stepper motor. It is important to note which magnetic materials can be used to increase the motor’s performance and how to control its step angle.